Collision Free Path Planning for Unmanned Aerial Vehicles in Environments with Dynamic Obstacles LoRISwork 2:08 4 years ago 41 Далее Скачать
Autonomous Exploration Path Planning in High-risk Environments using Aerial Robots PX4 Autopilot - Open Source Flight Control. 16:18 4 years ago 3 306 Далее Скачать
Integrated UAV Trajectory Optimization and Potential Field Approach for Dynamic Collision Avoidance ARG-SnT-UL 0:25 1 year ago 576 Далее Скачать
Reactive collision-free motion planning of UAV - simulation Aleš Novotný 0:52 6 years ago 45 Далее Скачать
Collision-free path planning based on a genetic algorithm for quadrotor UAVs Erik Rojo 1:55 4 years ago 253 Далее Скачать
Development of model-based unmanned surface vehicle algorithm for static/dynamic obstacle avoidance Wonkeun Youn 0:41 2 years ago 128 Далее Скачать
Collision-Free Path Planning for Cooperative Aerial Manipulators ARRL 0:58 4 years ago 309 Далее Скачать
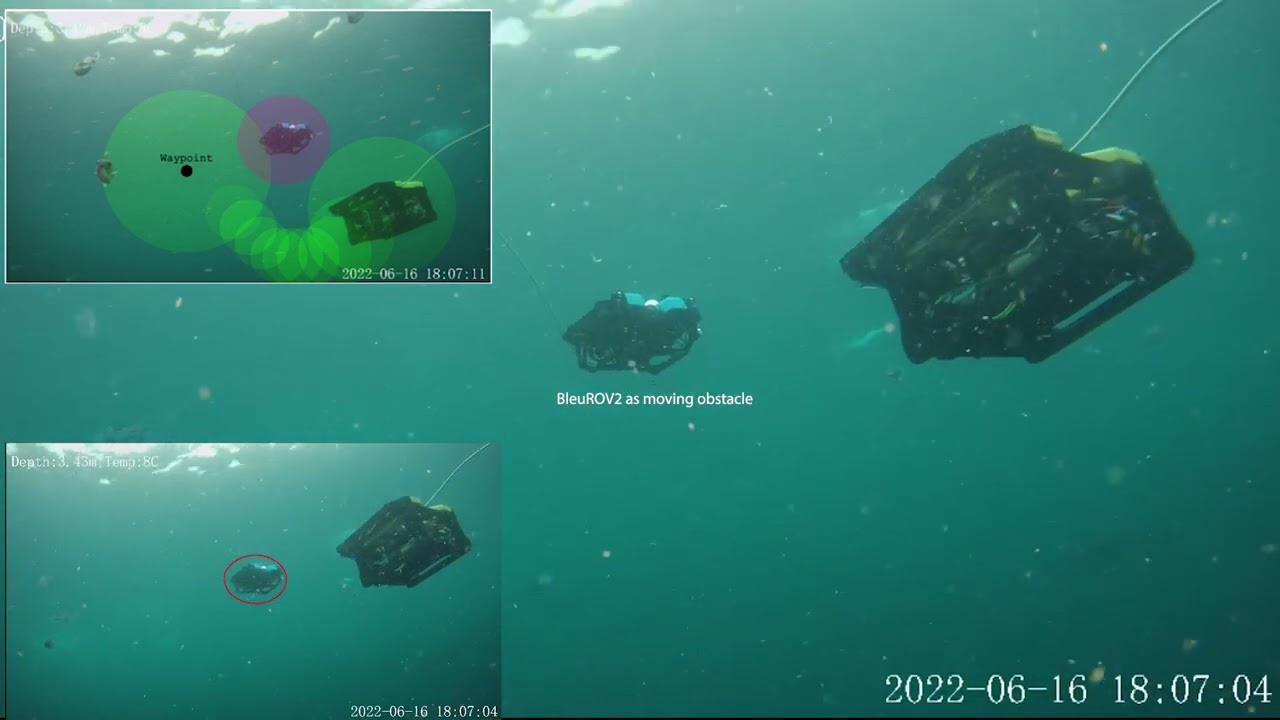
3D obstacle avoidance and path planning for unmanned underwater vehicles using elastic bands SINTEF Ocean 2:07 10 months ago 749 Далее Скачать
Collision Avoidance in Co-operative multi-UAV’s using Collision cone approach Nikhil Paliwal 0:34 6 years ago 194 Далее Скачать
Unmanned Aerial Vehicle Path Planning for Exploration Mapping Innopolis University 1:11 4 years ago 1 351 Далее Скачать
Collision Avoidance for Aerial Vehicles in Multi-Agent Scenarios aslteam 1:55 9 years ago 2 544 Далее Скачать
Simulation and Control for Learning Collision-Free Navigation for Aerial Vehicles | Micah Nye Explore Robotics: Education, Research, & Careers 6:20 4 months ago 12 Далее Скачать
Feasible Computationally Efficient Path Planning for UAV Collision Avoidance Han Wang 1:44 5 years ago 373 Далее Скачать
Online Generation of Collision-Free Trajectories for Quadrotor Flight in Unknown Environments Shaojie Shen 1:55 9 years ago 1 332 Далее Скачать
Distance of obstacle/object from UAV (Unmanned Aerial Vehicle Path Planning) Abdul Wasay sardar 0:45 4 years ago 97 Далее Скачать
UAV 3D path and motion planning in unknown dynamic environments XLIM-ReMix 2:40 4 years ago 76 Далее Скачать
Robust Vision-based Obstacle Avoidance for Micro Aerial Vehicles in Dynamic Environments Autonomous Multi-Robots Lab Delft 3:00 4 years ago 3 270 Далее Скачать
Coverage and Inspection Planning for Unmanned Aerial Vehicles Georgia Tech Research 21:36 4 years ago 368 Далее Скачать